![]()
Rofunc: The Full Process Python Package for Robot Learning from Demonstration and Robot Manipulation#





![]()
Repository address: https://github.com/Skylark0924/Rofunc
Documentation: https://rofunc.readthedocs.io/
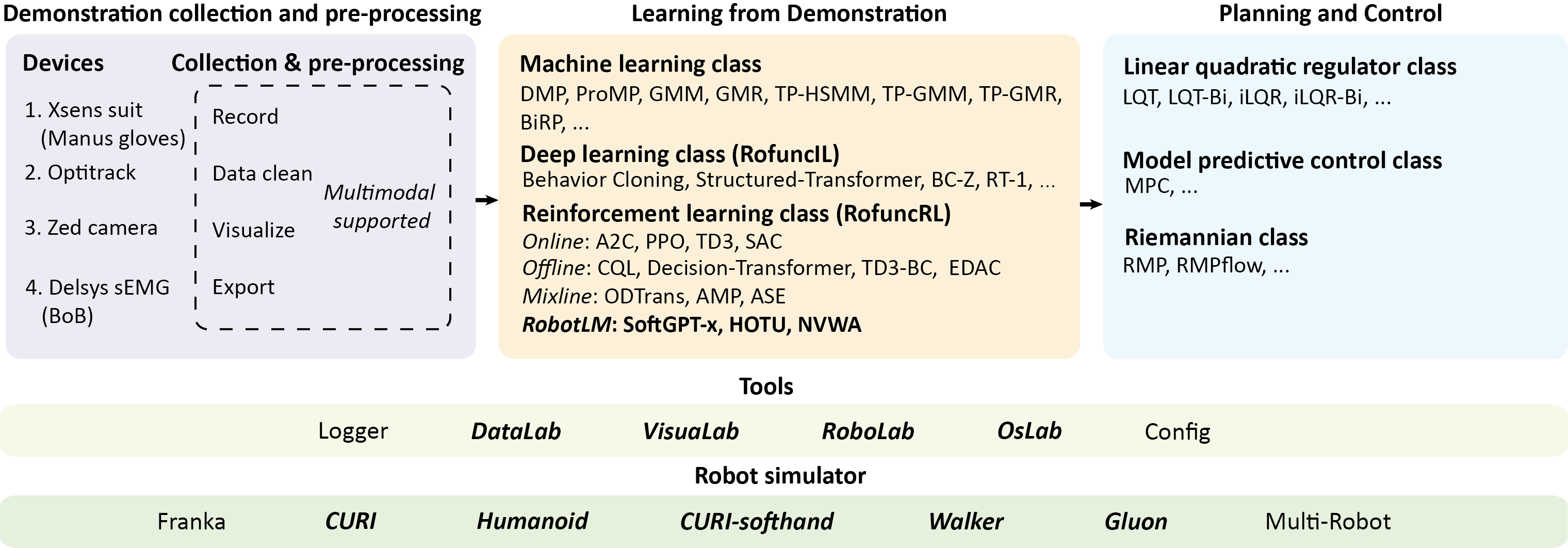
Rofunc package focuses on the Imitation Learning (IL), Reinforcement Learning (RL) and Learning from Demonstration ( LfD) for (Humanoid) Robot Manipulation. It provides valuable and convenient python functions, including demonstration collection, data pre-processing, LfD algorithms, planning, and control methods. We also provide an Isaac Gym-based robot simulator for evaluation. This package aims to advance the field by building a full-process toolkit and validation platform that simplifies and standardizes the process of demonstration data collection, processing, learning, and its deployment on robots.
1. Installation#
Please refer to Installation for installation.
2. Available functions and future plans#
The available functions and plans can be found as follows.
Note ✅: Achieved 🔃: Reformatting ⛔: TODO
Data |
Learning |
P&C |
Tools |
Simulator |
|||||
|---|---|---|---|---|---|---|---|---|---|
✅ |
|
⛔ |
✅ |
|
✅ |
✅ |
|||
✅ |
✅ |
✅ |
✅ |
✅ |
|||||
✅ |
✅ |
✅ |
✅ |
|
🔃 |
||||
✅ |
✅ |
✅ |
✅ |
✅ |
|||||
✅ |
✅ |
✅ |
✅ |
✅ |
|||||
✅ |
✅ |
✅ |
✅ |
|
🔃 |
||||
✅ |
✅ |
✅ |
|
⛔ |
|
🔃 |
|||
✅ |
✅ |
🔃 |
|
⛔ |
|
🔃 |
|||
✅ |
✅ |
🔃 |
✅ |
✅ |
|||||
✅ |
✅ |
|
🔃 |
✅ |
✅ |
||||
✅ |
|
✅ |
🔃 |
✅ |
|||||
|
⛔ |
|
✅ |
🔃 |
✅ |
||||
✅ |
|
🔃 |
🔃 |
✅ |
|||||
|
⛔ |
|
⛔ |
✅ |
|||||
|
⛔ |
|
⛔ |
✅ |
|||||
|
⛔ |
||||||||
✅ |
|||||||||
✅ |
|||||||||
✅ |
|||||||||
✅ |
|||||||||
|
⛔ |
||||||||
|
⛔ |
||||||||
✅ |
|||||||||
|
⛔ |
||||||||
✅ |
|||||||||
✅ |
|||||||||
|
⛔ |
3. Citation#
If you use rofunc in a scientific publication, we would appreciate citations to the following paper:
@software{liu2023rofunc,
title = {Rofunc: The Full Process Python Package for Robot Learning from Demonstration and Robot Manipulation},
author = {Liu, Junjia and Dong, Zhipeng and Li, Chenzui and Li, Zhihao and Yu, Minghao and Delehelle, Donatien and Chen, Fei},
year = {2023},
publisher = {Zenodo},
doi = {10.5281/zenodo.10016946},
url = {https://doi.org/10.5281/zenodo.10016946},
dimensions = {true},
google_scholar_id = {0EnyYjriUFMC},
}
Warning
If our code is found to be used in a published paper without proper citation, we reserve the right to address this issue formally by contacting the editor to report potential academic misconduct!如果我们的代码被发现用于已发表的论文而没有被恰当引用,我们保留通过正式联系编辑报告潜在学术不端行为的权利。
5. The Team#
Rofunc is developed and maintained by the CLOVER Lab (Collaborative and Versatile Robots Laboratory), CUHK.